The working principle of the stepper motor control
The name of the step motor
Stepper motor, stepping motor, stepping motor (step motor), or the pulse motor (pulse motor), and other such as (stepper motor), etc... Has a variety of call way, these with the Japanese words to said, became a step motor, and order is stage step by step action meaning, this use another language to say, is to be stepping drive, in short, is a pulse input there will be a certain Angle, the distribution of rotor displacement motor.
Stepper motor's brief introduction:
Stepper motor is the electrical pulse signal into angular displacement or linear displacement of open loop control components.
In the case of the overload, motor speed, stop position depends only on the pulse signal frequency and pulse number, and not affected by load change, which give the motor a pulse signal, a step from the Angle of motor is turning.
This line sexual relations, and the error of the stepper motor only periodic without cumulative error, etc. Made in the field of speed and position control with stepper motor to control becomes very simple.
Single-phase stepper motor has a single way electrical drive, power output is generally small, the purpose for small power drive. Multiphase stepper motor with multiphase square wave pulse drive, quite useful. Using multiphase stepper motor, single-channel electrical pulse signal is converted to a multiphase pulse signal can be through the pulse distributor first, after the power amplification, respectively, into the stepping motor each winding. For every input pulse to pulse distributor, motor current state of each phase is changed, the rotor turns an Angle (called the step Angle). Under normal circumstances, the stepping motor turned is directly proportional to the total number of Angle and the input pulse; Continuous input a certain frequency of pulse, the speed of the motor keep strict corresponding relation with the frequency of the input pulse, not affected by voltage fluctuations and load change. In the case of the overload, motor speed, stop position depends only on the pulse signal frequency and pulse number, and not affected by load change, which give the motor a pulse signal, a step from the Angle of motor is turning.
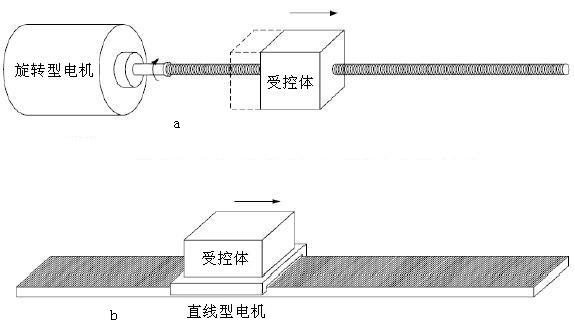
Stepper motor according to the rotational structure is divided into two broad categories: 1 is below A circular rotating motor 2, linear motor structure like A circular rotating motor is expanded, B as shown
One. the kinds of stepping motor
Now, in the market of stepper motor has a lot of kinds, according to the performance and use have different use.
For example, the distinction between different use precision position control of hybrid, or a low price to use simple control system composed of PM type, due to the magnetic motor structure classification, so it will have influence on the performance, the other is classified according to the appearance of the stepper motor shape, also have phase number to classification by the driver, and classification of drive circuit, etc.
With stepper motor rotor material can be divided into three categories.
< 1 > type PM stepping motor, permanent magnet type (permanent all type)
< 2 > VR stepper motor type: type variable reluctance (variable erluctance type)
< 3 > HB type hybrid stepper motor, compound (hybrid type)
Type 1, PM -
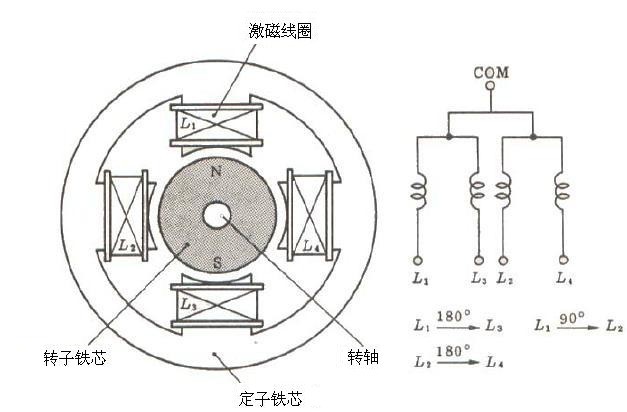
PM type stepping motor principle structure as shown in figure 1, the rotor is a permanent magnet, further to the configuration around the plural of the stator.
In figure 2.2.1, the rotor magnet for N, S a pair, and the stator coil is composed of four, because the step Angle and has a direct relationship, so if need the micro step Angle, the driving force of the rotor magnet pole and stator coil number without a corresponding increase, in the construction of the figure 1 and the step Angle is 90 °.
Mainly USES in larger torque applies work machinery, or special use small starter roll-up machine. Is also useful in other output for subminiature motor under 1 w, in short, the number of VR type is very small, only on the total output of the stepper motor number % level.
Also, the types of the step Angle is 15 ° and 7.5 ° and 1.8 °, but the number 1.5 ° step for the popularization.
3, HB hybrid
Hybrid stepper motor, which is composed of stator magnetic pole (tooth) and and its to the rotor of the magnetic poles, one step closer to the rotor has the majority of the tooth shape, on the shaft and in the same direction by magnetized permanent magnet, and on the structure more complicated than the previous PM and VR model, basically can be considered by the structure of the integration of VR and PM.
The meaning of the hybrid type hybrid type exist, this just is VR and PM combination, so there will be so called.
Generally hybrid, for high precision, high torque, small step Angle and several excellent characteristics, so start in OA relationship, other also sharply on classification is used, especially on production is largely used on the head of the relationship between disc memory transfer.
Also, on the step Angle is 0.9 ° and 1.8 °, there is other 3.6 °, compared with other motors, stepper Angle with very fine.
Figure 3 to figure in the construction of the hybrid stepping motor is here, in the stator has eight field coil upper department, the one step closer to the poles on the apex of a small tooth with plural car (DCS), these are for the rotor side of the tooth shape magnetic pole, and stepper motor drive mechanism.
Second, principle of stepper motor driver
About stepper motor drive mechanism, with simple structure map simple instructions, in figure 4
Is in order to explain the structure of the principle of stepper motor driver figure, on the fixed structure has four tied for the electromagnet, it has a moving magnet below to it, and, on the underside of the magnet device for guide roller for linear guide shaft, along the left and right moving structure.

So, in this by the additional instructions, the motion of the stepper motor now, electromagnet L1 and moving magnet interact to produce magnetic attraction between Mg, thus occasions here, (a) the location of the slip effect static load, followed by electromagnet L2 excitation, the electromagnet L1 OFF just now, due to such a moving magnet will attach to the location of the electromagnet L2 are attracted, will be in the position of (b), further by excitation in electromagnet L3, electromagnet L2 OFF just now, due to such a moving magnet will move to the location of the electromagnet L3, becomes in the position of (c).
The following, according to the operation of each action and repeated to the arrow direction, moving magnet, therefore, in accordance with the movement under the action of progressive, like this can realize an actuator (in this case for linear motion), and, in the use of electromagnet L1 ~ L4, incumbent mountable moving magnet (Mg) on the side, all flow of electric current to produce a N pole.
And put it on the structural map not only has four electromagnetic valve, on the need to also can increase its corresponding number.
Figure 4 of the motor into linear motion, anyhow is belong to the linear stepper motor, thus, as such does not become a transformation of the situation, so, in order to become a transformation must be under some kung fu, figure 5 in order to make the structure of the linear type just now, the end of the rotary type so its driving principle in nature and just straight line sport.

Three, the characteristics of the stepper motor
< 1 > rotation Angle and the pulse is proportional to the input, so use open loop control can achieve high precision Angle and high precision positioning of the requirements.
< 2 > start, stop, and reversing the responsiveness of a good, easy to control.
< 3 > every step of the level Angle error is small, and there is no cumulative error.
< 4 > in the controllable range, speed and pulse frequency is proportional to the, so speed range is very wide.
< 5 > static, stepping motor has high maintain torque (holding torque), can remain in the position of the stop, do not need to use brake device that is not free rotation.
< 6 > in super low speed high torque.
< 7 > high reliability, no need to maintain, the low price of each system.
Easy to step out when < > 8 high-speed operation
< 9 > in a prone to vibration or frequency resonance phenomenon
Four, choose the parameters of the stepper motor
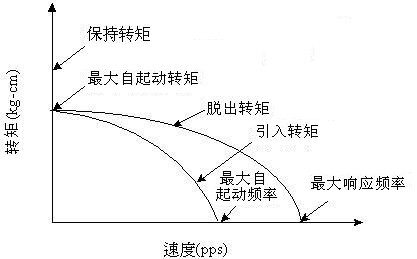
Introducing the torque (pull - in the torque)
Introduction of torque is refers to the stepper motor with the input signal synchronization of the maximum moment when starting, stop, so the introduction of torque motor in which of the following areas can do it as the input signal synchronous start, stop, and positive &negative, and this area is known as the starting area (start - stop region).
The biggest since the starting torque (maximum starting torque)
Since the starting torque is refers to the largest when the arteriogram rate below 10 PPS, stepper motor with input signal synchronous start, stop, maximum torque.
Since the start frequency is refers to the largest motor with no load, the output torque is zero's largest input pulse rate, motor can instantly stop, starting at this time.
Hernia (pull out torque) maximum torque since the start frequency (maximum starting pulse rate)
Emergence is refers to the stepper motor torque and input signals synchronous operation, but not an instant the maximum moment when starting, stop, so more than out torque motor can't work, at the same time between emerge under the torque and torque above is introduced, the motor can't instant starting, stopping, the region known as reverse area (slew region), if you would like to start, stop, once in the area you must first will motor back to the starting area, otherwise you will lose step.
Maximum response frequency (maximum slewing pulse rate)
Refers to the maximum response frequency motor with no load, the output torque is zero's largest input pulse rate, the motor can't stop, starting moment.
Keep the torque (holding torque)
Holding torque is when the coil excitation conditions, keeping the rotor, the load change of rotor position needed to exert the maximum torque.
Stepper motor torque and rotational speed for the exponential relationship between inverse ratio, that is when the rotating speed, the greater the torque is smaller, instead of rotating speed, the smaller the greater the torque, because the phenomenon can be regarded as excitation coil inductance and resistance of the series circuit, when the excitation coil current and the relationship between resistance, inductance, as shown in the following type:
(1)
The time constant. By a type (1) the coil of the exciting current is over time, while the output torque is proportional to the current size, so when the speed is slow when the coil current have enough time to reach the maximum, so the output torque is larger; The same, when the rotation speed increase fast excitation signal transformation, makes the coil current weakens falling output torque.
Five, stepper motor terms:
* phase number: create an extremely different N, S magnetic field coil logarithmic. Commonly used m said.
* count: the number needed to complete the periodic changes in a magnetic field pulses or conducting state expressed with n, or refers to the motor turns a pitch Angle pulse number, four phase motor, for example, there are four phase is AB - BC - four step way
* CD - DA - AB, four phase eight step method, A - AB - B - BC - C - CD - D - DA - A.
* interval Angle: corresponds to a pulse signal, motor rotor turning angular displacement with theta. Theta equals 360 degrees (rotor teeth J * implementation steps), with conventional phase two, four, rotor teeth of 50 motor as an example. Four steps performed interval Angle is theta = 360 degrees/(50 * 4) = 1.8 degrees (commonly known as a whole step), eight steps performed interval Angle is theta = 360 degrees/(50 * 8) = 0.9 degrees (commonly known as half step).
* location: torque motor in the condition of no electricity, motor rotor's own locking torque (caused by error of tooth harmonic magnetic field and mechanical).
* : static torque motor in the rated under the action of static electricity, the machine does not make the rotary motion, locking torque of motor shaft. This moment is the measure of motor volume (geometry), has nothing to do with the drive voltage and drive power supply, etc. Although the static torque is proportional to the electromagnetic excitation ampere turn, with the air gap between the rotor teeth, but too much by reducing the air gap, increase the excitation ampere turns to improve static moment is not desirable, it will cause heating of the motor and the mechanical noise.
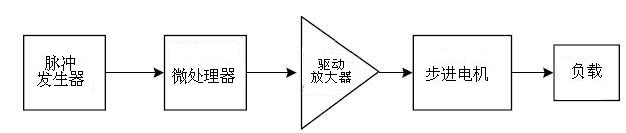
Six, the working process of the stepper motor
The generation of the pulse signal
The pulse signal generated by the CPU or MCU commonly, the proportion of the general pulse signal is about 0.3 to 0.4, the motor speed is higher, the bigger the ratio is.
� microprocessor
Four phase stepper motor, for example, there are two, four phase motor works four phase four steps for AB - BC - CD - DA; Four phase eight step for AB - B - BC - C - CD - D - AB.
� power amplifier
Power amplifier is the most important part of the stepping motor driven system. Stepper motor under a certain speed depends on the stepper motor torque dynamic average current instead of static current (the current on the sample are static current). The bigger the average current of motor torque, to achieve an average current big which requires motor drive system to overcome the potential. Take different drive mode, and therefore different occasions so far, the stepper motor drive mode usually has the following kinds: constant pressure and constant pressure series resistance, high and low pressure drive, constant current and fine fraction.
Seven, the operation characteristics of stepping motor:
Figure 6 of the stepper motor control flow chart, step into the electrical engineering department controlled by microcomputer controller, when the control signal from microcomputer output, then amplify the signal by the driver, achieve the goal of control motor operation, the whole control process is no use to any feedback signal, so the stepper motor control model for a typical closed loop control, the Close loop control). The advantage of closed loop control as the control system is simple, no feedback so don't need to lower cost of sensor signal, but is because of the control of the stepper motor to open loop control, so in case of out of step motor or stall, can't make a correct position error sensors will immediately back to the compensation, to resolve similar problems can only start from understand stepper motor operation characteristics.
Stall refers to the rotation of the rotor when the motor speed can't keep up with the stator field, causing the motor rotor stop running. Have all sorts of motor motor stalling phenomenon may, on application of general motor, when stall occurs often winding coil burned consequences, but stepping motor stall occurs by only a static, coil, though still in the field, but due to the pulse signal, so as not to burn the coil.
Stall is refers to the rotor speed can't keep up with excitation completely and perfectly still, the cause of out-of-step is because of the increase speed when the motor running in the moment, because the output torque and rotational speed is inversely proportional to, so the torque decline unable to load the external load, caused by a small slip. Step out of the picture is only step electricity, to avoid out-of-step can according to the speed of the stepper motor torque curve mixing motor acceleration control program. Figure 7 for the characteristic curve of step motor, the speed of abscissa in figure refers to the number of pulses per second (pulses per second). The greatest difference is like a motor characteristic curve and stepping motor has two characteristic curve, and stepper motor can be normal operation range is limited to introduce the torque between. Shown in figure 7 of the dynamic characteristics are described as follows:
Eight, the use of stepper motor
Due to the stepper motor drive signal for use by pulse wave signal, therefore to ordinary when dc power supply and motor winding, the motor is not continuous. In addition, the stepping motor of the power cord at least five, one of which is contact with the rest of the four is A phase respectively, A, B, B + + phase four phase input point, some of the stepper motor power cord with A total of six, including two common contact, will be A phase, A +, with B, B + 4 phase of the input point is divided into two groups. To distinguish what is total contact, what is the excitation input point and the positive and reverse order, you can use first three measured in meters of om gears of coil resistance, resistance of each phase should be equal in theory, find out the total contact again after at below rated voltage current of dc power test, you can find the stepper motor excitation of positive and reverse order.
Nine, stepper motor operation principle
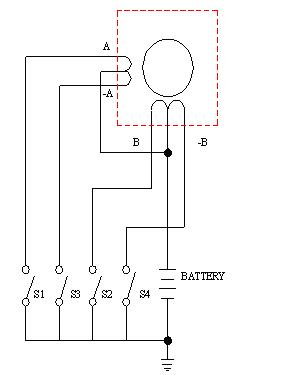
As shown in figure 1 as four phase (actual) 2 phase type stepping motor's basic structure diagram. Between the rotor consists of a permanent magnet, left for the N pole, on the other side for the S pole. Stator, four coil L1, L2, L3 and L4, respectively, all the C end of coil were positive, the other end via a switch on the power of the cathode, in figure 8.
When we switch S1 press, access to A current coil, and produce N pole magnetic field, because the same field, opposites attract, the rotor S extremely attracted to A pole. Second, release the switch S1, and immediately press the switch S2, A pole magnetic field disappeared, A magnetic field B class, attract the S pole of rotor and rotor with 90 degrees clockwise. Like this, in turn, let the four pole access of the stator current, can make the rotor rotation.